Step 3: Static Thrust and Power
Now that you have layed the groundwork for your drone, it is time to use some math. While a drone is mechanically simple, it is very important to use the correct equipment. The hobbyist buys parts and hopes they work, replacing parts to see what new results he/she can obtain. The engineer learns the mechanisms that determine results and designs according to the results he/she desires.
As in any engineering situation, in order to make the design of practical value we must decide how deep we are going to dive. Propeller performance alone is an immensely complex topic. Fortunately we do not have dive down deeper than using (and hopefully understanding) a few equations.
For our quadcopter design we used Momentum Theory to relate thrust and power. Now comes the answer to why we started out with an initial weight calculation. It will likely be easier for you to learn these equations while being able to plug in some realistic numbers. When a quadcopter hovers, we say the motors are producing static (motionless) thrust. We designed our quadcopter to be most efficient at hover. This makes the most sense because our main optimization focus is flight time. By sticking to the static thrust case (as opposed to dynamic thrust) we can narrow the playing field and not get into advance ratios (those basically deal with performance at different air speeds relative to the propellers).
While we will boil everything down here, we have provided the sources we've used at the bottom for more detailed information and derivations. We also would like to note that our derivations based on Momentum Theory hinges on a set of assumptions that aren't necessarily quantifiable. Suffice it to say, we are confident in the use of Momentum Theory to yield a good estimation of performance because based on the typical higher disc loading (ratio thrust to propeller area) for quadcopters, Momentum Theory should hold the better for them over helicopters. Basically, if you would apply it for designing anything, it would be multirotors.
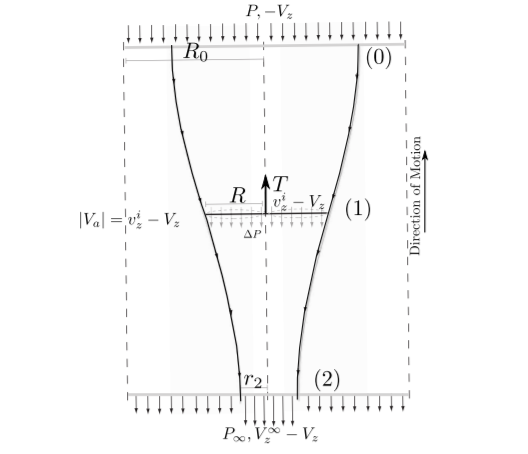
Momentum Theory as applied for application to quadcopter design is as follows:
Thrust is the difference between the momentum of the flux going out and the momentum of the flux coming into the propeller "streamtube".
Equation 1:

 Source: ANU
Source: ANU
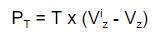
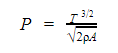
Power is the rate of kinetic energy imparted across the streamtube and is equal to thrust multiplied by local air velocity.
Equation 2:
An important distinction must be made at this point. Power in these equation refers to the power as a rate of energy per time expended producing lift. It is lifting power if you will. Not to be confused with electrical power from a battery or even mechanical power from a motor. There are 3 stages of power in a quadcopter. Electrical power from a battery that is translated to mechanical power by a motor subject to motor efficiency. And that mechanical power at the shaft of the motor is translated into what we may call lifting power by the propellers subject to that propeller's figure of merit (a fancy term for the efficiency with which a propeller translates mechanical rotational power into lifting power). Keep in mind the three types of power because the distinctions are absolutely critical to maximizing flight time.
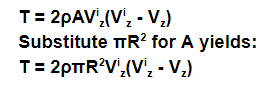
Now if we substite equation 1 into equation 2 we get the following:
Equation 3:

We can make the following substitution:
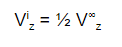
And thus:
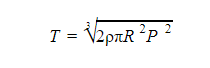
Now we come to the final forms of the equations we will use for our static thrust and power. At hover Vz is equal to zero. That gives us the following:
Equation 4:
Solving for thrust:
Equation 5:
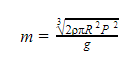
And finally, note that at hover the thrust will be equal to the weight of the quadcopter (the product of the mass and "g").
Equation 6:
Now that we have laid the groundwork relating power and thrust we can move on to the next section: Propeller Selection