Step 8: Frame Selection
Hopefully you started out with a decent guess as to what frame you would use for your quadcopter as it's a substantial portion of the weight. But this is the point in our design roughly where we heavily weighed frame options from product to product. At this point in your design you should be closely monitoring the implications of any change such as a slight weight adjustment due to a change from your original frame weight estimate.
In general you want the frame size to match the application for which you are designing. If you want to carry any sort of payload like a gimbal and camera we suggest a frame size of 350mm (length from motor to motor) or larger. For other applications like first-person-view flying, you could go smaller than 350mm.
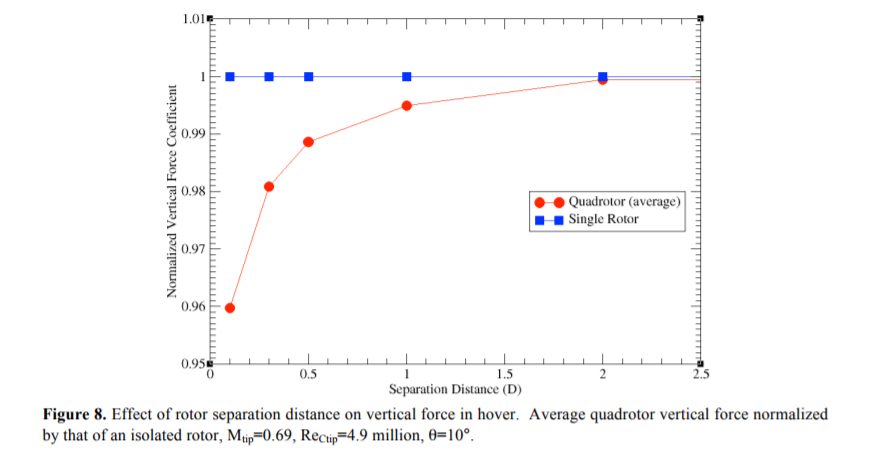
Another consideration for when selecting a frame size is propeller spacing. A study from NASA shows that propeller efficiency actually decreases when the propellers are placed too close together. See the graph below for details.
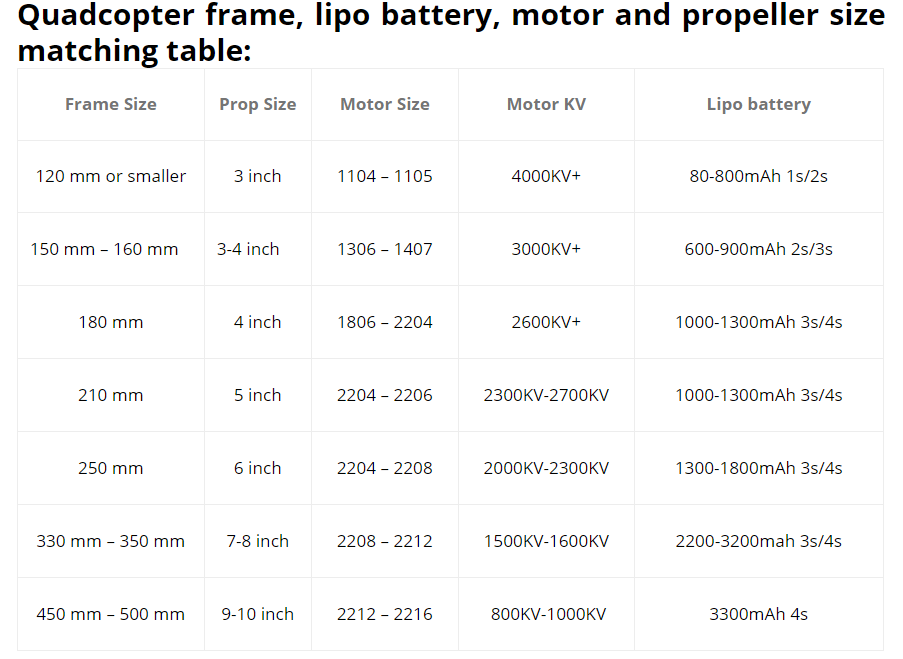
And finally, while we haven't looked verified this particular table, you can always check tables like the one below for recommendations.
For our quadcopter build, we chose a 450mm frame with 10in diameter propellers. You can use Pythagorean's Theorem to easily derive the motor spacing to be about 12.5 inches. After subtracting out the radius of each propeller we get a spacing of .25D between the propellers. This isn't exactly ideal for efficiency but the decrease in efficiency is only about 3.5%. However, based on a other data, this is probably better than an increase propeller spacing with smaller 8 inch propeller for example. And convential wisdom may only gain a 1% increase in efficiecy.
Finally, optimizing to maximize propeller efficiency to effectively zero losses due to propeller spacing is almost certainly not worth it. We see room for interpretation, but we don't see a need to emphasize beyond saying to just keep some reasonable distance like at a minimum of .2D between the propellers. To expand out to 2D would seem superfluous.