Step 6: Battery Selection
The battery is one of a UAV's most critical and potentially volitile components. There are three important specifications to consider during battery selection: voltage, max current discharge, and capacity. Each parameter is heavily dependent on the battery's chemistry.
Part 1: Battery Construction
At its most basic level, a battery has two separate materials with differing numbers of valence electrons that act as electrodes in addition to an electrolytic buffer between the two electrodes. Batteries are described by combination of elements used. For instance, lead-acid batteries are in almost every car. Nickel-metal hydride batteries are a common rechargable battery used in most households. Lithium-ion batteries are found in most laptops and phones. The most common battery type for UAVs is Lithium-Polymer (LiPo). The electrodes are made of graphite and lithium with a polymer being the electrolyte. The electrode pairs determine the voltage ranges a battery can provide. For LiPo cells, this is approximately 4.5V to 3V. However, these voltages aren't usually adequate.
The UAV's electronics need a constant voltage to function, which can exceed 4.5V. More importantly, the motors need a higher voltage (as described previously). In order to reach these voltages, the cells need to be connected in a series such that the negative electrodes are joined with the positive ones leaving an empty pair of electrodes. LiPo batteries can be bought with just one cell or as many as 10 cells. As an example, a battery sold with 3 cells in a series will be a 3S battery, and 4 cells in a series would be a 4S battery.
Just as important as the total voltage a battery can provide is the total energy capacity of a battery. This is given in units of ampere-hours (Ah) or milliampere-hours (mAh). Essentially, a 1 Ah battery can provide 1 amp of electricity for 1 hour. With larger cell sizes, batteries can store more energy. When connected in series, however, all the cells must have the same capacity. When any one of them runs out of energy, the battery stops functioning. Cells connected in parallel (where the identical electrodes are connected) increase the capacity but not the voltage. This arrangement for UAV batteries is rare though.
The amount of current a battery can supply is important. Larger motors and UAVs require more current. The cell construction factors into it. Batteries have a c-rating that specifies how much current the battery can supply in relation to the battery's capacity. A 5 Ah battery with a 10C rating can supply 50 amps of current.
When selecting a battery, the number of cells needs to provide adequate voltage for optimal UAV operation. The c-rating needs to be high enough to meet the demands of the motors. The capacity has to be high enough to provide adequate flight time, but this has to be balanced with the weight that a higher capacity battery adds to the UAV.
LiPo batteries are commonly used since they can provide a large amount of power relative to their size. They do have one major drawback: volitility. They can be sensitive to impacts, being over discharged, or charged too much. When these conditions occur, the batteries can ignite. Because of these downsides, another battery chemistry, lithium iron phosphate (LiFe), is becoming increasingly popular. It is more durable, but it has a lower voltage range. When storing or charging LiPo batteries, it is advisable to keep them in a fireproof container. There is a debate over what voltage to store the batteries at. The common advice is that they ought to be stored at their nominal (50%) voltage, but this advice is disputed. More advanced chargers will have functions to charge or discharge the battery to this nominal voltage. Batteries also need to be cycled a certain amount of times before they reach their optimal efficiency and some chargers will have an option to cycle the battery automatically.
Part 2: Battery Analysis
Now that we've laid out some guiding (and very important!) principles for batteries, we will lay out our considerations in selecting a battery. With multiple parameters to consider we will start with the parameters related more to optimization only and finish with parameters that must be checked to ensure safety. In other words, we will lay out how to find a battery that we want and then lay out how to ensure this battery can be used safely with our quadcopter.
Voltage: One of the first things to consider is what voltage battery we want. Honestly, from what we can tell, the voltage you pick for your battery is somewhat arbitrary. But here are some things to consider. If you want to build a racing drone, a higher voltage battery is desirable because it raises the top speed of your drone.
- If you want to maximize flight time but aren't as concerned with performance, a higher voltage COULD be desirable if you can correlate some level of advantage to your energy density or efficiency.
- We have probably seen 3S and 4S (Ie. Xiro Xplorer or DJI Phantom) the most for larger quadcopter and then 1S for small quadcopters (Ie. Drones that are largely considered toys.).
Capacity and Energy Density:
Rather than concern ourselves with finding an optimal voltage, we concerned ourselves with finding an optimum capacity and energy density. Because electrical power is equal to IV and thus stored energy is equal to IVt (where t is time) then a 4S battery with some capacity like say 4000mAh will have more energy. But it will also be more weight just like if you maintained a 3S voltage but increased the capacity.
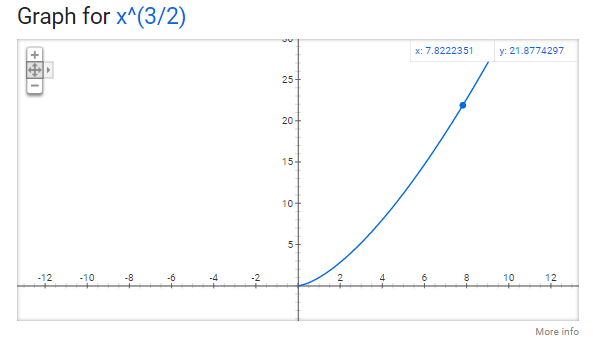
This is a key observation because increased weight means increased power required to hover. And remember that the power won't go up linearly with the weight of the drone. Power is related to thrust by a 3/2 power.
Let's turn to Google to illustrate our concern.
Here is a generic graph for y = x^(3/2)
Now if energy and weight increase linearly we might get a situation like this.
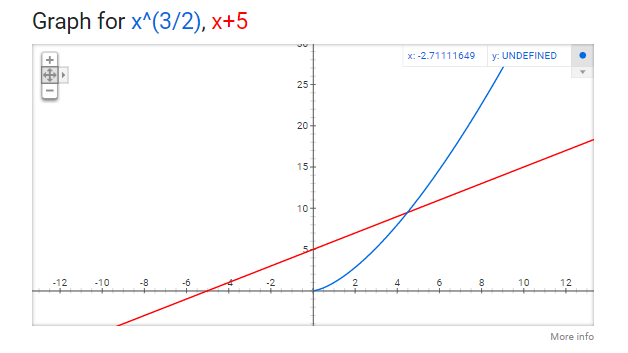
You can see that to the right of the intersection you may actually be LOSING flight time. However, from what we have seen, you actually gain energy DENSITY as you increase capacity. So we don't expect the situation to be so simple as the one presented above courtesy of Google.
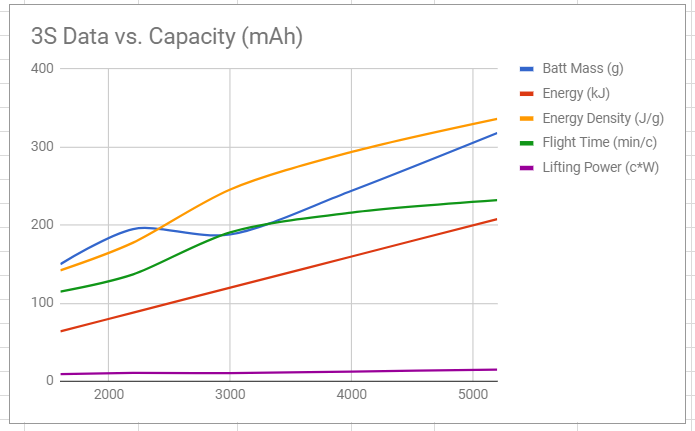
Let's dig deeper. Here's a graph comparing some parameters for 3S batteries of different capacities. These calculations assume a quad of mass 700g not including the battery - which is roughly what we designed for our quadcopter.
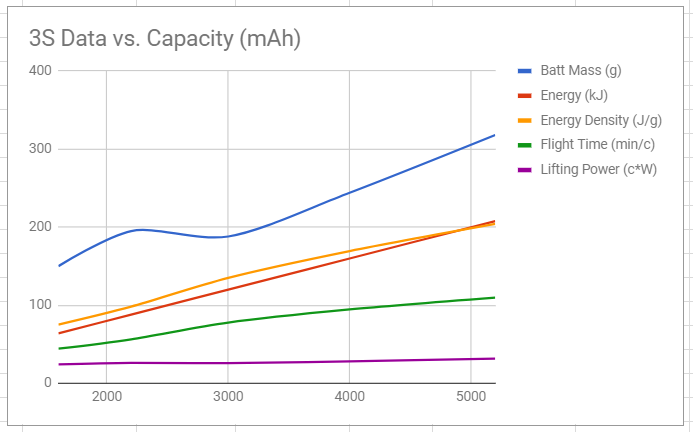
Now we will say, as we inspect the hovering case, Power is equal to some constant of proportionality, c, (we will assume 1 for scaleability) multiplied by Thrust raised to the 3 halves power. And of course this assumes all other things being equal from air density to prop figure of merit to motor efficiency. But all other things being equal this is what see.
The dip in the battery mass curve is because we actually found a battery of higher capacity and lower mass - an outlier in this data that we wanted to include nonetheless. The key parameter we would like to point out on this graph is flight time. Observe that when we factor in all of the necessary variables (to our knowledge) the flight time is shown to increase witht the battery capacity size. However, it also seems to increase at a lower rate as the battery size gets bigger. This decrease in the rate of change suggests the flight time may peak at some capacity and then actually begin to descend. 3S lipo batteries don't seem to generally exceed roughly 6000mAh so we don't expect to see a huge swing down. For reference later, here are some data points.
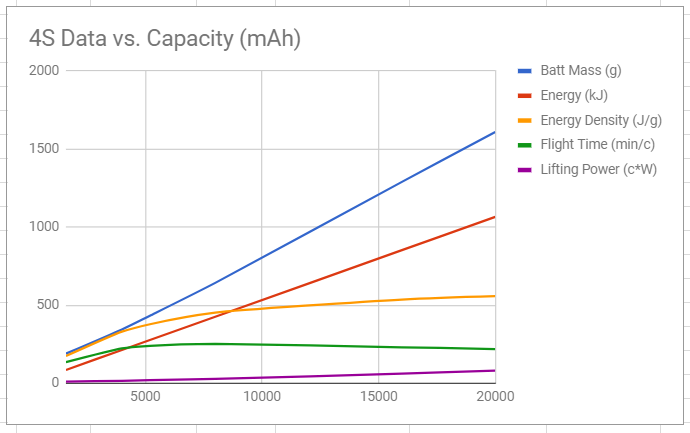
Now let's look at a graph for 4S lipo batteries now. 4S is the floor for "high capacity" more or less so we will throw in a high capacity battery at the end to see what happens.
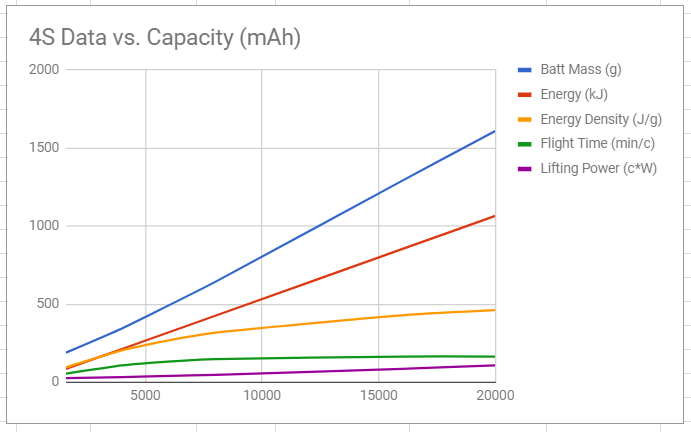
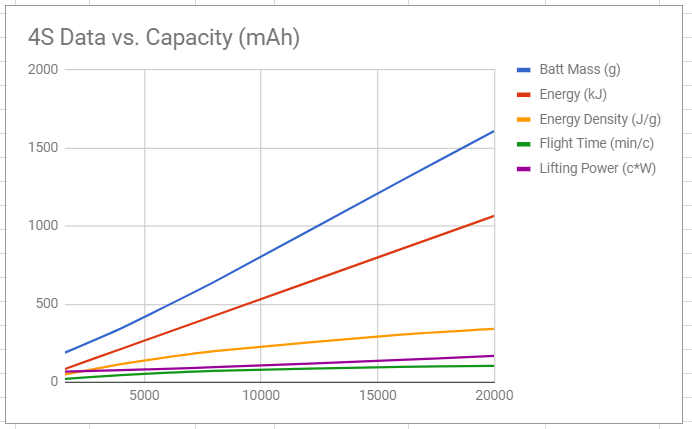
Here we see a more pronounced decrease in the rate of increase in flight time. Let's see what happens if we change the weight to 300g. For the bigger batteries this would basically just be a tiny quad lifting a HUGE battery by comparison and quite absurd, but let's take a look anyway.
Here the flight time actually decreased from the 4S 16000mAh battery to the 4S 20000mAh battery.
Now let's go the other way. Let's look at 1500g not including the battery.
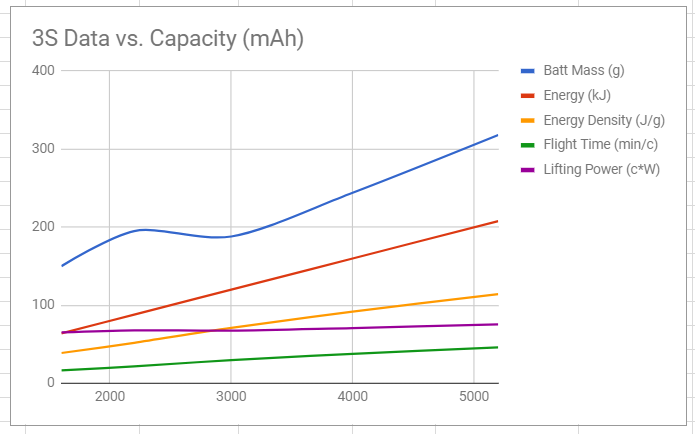
Here we see the performance do a little better from battery to battery. But the overall flight time suffers because the total weight of the drone is of course significantly heavier.
The bottom line here is that based on the results of increased battery size as related to flight time as you move up in battery sizes for a given weight, you can pretty much go for the biggest battery that will reasonably fit on your quadcopter in order to maximize your flight time. The sky is the limit as it were and you will more than likely have to deal with physical constraints before you have to deal with weight constraints.
Motor Compatibility: The final topic we'd like to address when selecting a battery is its compatibility with your chosen motor. First ensure that the motor is rated to operate with whatever battery voltage you choose. And last consider the efficiency of the motor when operating with that battery. We won't pretend to fully understand how much a motor's efficiency may vary with battery voltage beyond surmising that matching the battery voltage (in its discharged state) as closely as possible to the voltage necessary to produce 2x hover thrust (assuming you shot for a 2/1 max thrust to weight ratio) is the most efficient because it will require the least PWM. And in general, this will vary not only with the motor in question but with what propeller it is turning. Shorter propellers requiring higher rotational speeds will tend towards higher voltages (and thus higher voltage batteries by this logic) and longer propellers will tend towards lower voltages (and thus lower voltage batteries by this logic). That is our stab at this. The bottom line here is that the battery must be able to supply the voltage necessary for maximum thrust, whatever that is based on your desired max thrust to weight ratio.
Price: All of the above may easily be subject to price. We will just illustrate by saying that you probably would not want to increase the cost of a drone from say $200 to $400 in order to increase the flight time from 13 min to 15 min.
Initial Discharge Check and Plan for Final Check: The last topic we'd like to address is verifying that the anticipated max discharge current from the battery will not exceed the rated discharge current capability. Remember that the max current rating for discharge in a steady state is the number of the C rating multiplied by the current-time capacity. For example, a 5,200 mAh 10C battery can discharge a maximum of 52A continuously. This is an important consideration as you build larger drones. You either need a higher capacity battery or a higher C rating as the drone gets heavier because it will require more current for a given voltage battery to turn the propellers. Remember from the motor analysis that current is necessary to produce torque. Larger propellers will require more torque and thus current. Don't forget to consider your electronics. They will likely not draw very much current at all but all good designs cover their bases. It would be a real shame to harm the battery because the electronics drew the current that broke the camel's back. Finally, if you haven't nailed down your electronics for sure at this point (we will cover electronics in the next section) just plan to leave a buffer. If you plan to build a quadcopter with just the essentials to fly (no fpv or videography equipment) then you likely won't draw more than an 10W (About 1 Amp for a 3S battery) for a conservative estimate. We estimate our current phase 1 (flight control only) setup draws to order of half an Amp for all of the electronics put together.