Balance of Forces: Part 2 (Quadcopter Torque Balance)
Now that we have talked about the lift and Newton's third law, we can discuss quadcopter motion in more depth. We have already discusses lift and how it is essentially generated by an airfoil pushing air down while pushing itself up (Newton's third law). Now we must discuss balancing radial forces, commonly called torques. A torque is simply a twisting force. You put torque on a screwdriving to turn a screw and you put torque on a door to open/close it. Torque is equal to the product of force and distance between application of force and object of force. The radius between your hand and a screw is small. The radius between a door handle and hinger is much greater. To quickly dive in deeper. Have you ever noticed it is easier to open a door if you push it at the hand than it is if you push it near the hinge? This is because you must exert more force to obtain the same torque at the hinge (short radius) than you must exert at the door handle (long radius).
Now, motors produce torque to spin things. Your drill, your washing machine, and your quadcopter motor all exert torque. The issue we need to discuss is the equal opposite torque exerted back on the motor. Your body is like the table from the previous section. When a drill produces torque, pushing the shafter around at a radius if you will, there is a force at some radius back on the drill. However, the force is transmitted ultimately to the person held to the floor by Earth's gravitation. Here again, Earth is the great equalizer. Likewise with the washing machine. There is a torque turning the wash bin but an equal and opposite torque acting on the washing maching. However, the earth exerts a torque right back keeping the washing machine solidly on the ground. But what about a quadcopter? Let's continue.
A quadcopter has no such great equalizer when it is in the air. Suppose you built a monocopter, one propeller instead of four. When you turned the throttle up to spin the motor faster and generate lift the propeller would spin around but the body of your copter would too! The body is experiencing the same torque as the propeller. Of course, we don't want a chaotic spinning copter. We want a smooth, stable copter. This conundrum was solved long ago with the arrirval of the helicopter. That small rotor on the back creating a lift force at a radius down the tail of the copter (torque) to oppose the torque of the main rotor producing upward lift.
But helicopters are mechanically complex. They aren't necessarily easy to build from the ground up. Enter... The multicopter. Without trying to get into too many details (Feel free to read here if you like.) multicopters are great at this sort of flight because of their mechanical simplicity. How do they solve the problem above? Simple. If you mount a second motor turning at the same speed, the torques on the copter body cancel and you are left with a non-twisting ascending copter body. But you still need at least a third motor to achieve three degrees of rotational freedom (see the term "yaw" on next page for an explanation on that). The most common design currently is the quadcopter (the least daunting and the multicopter setup we chose for our UAV). See the image below for reference. It will come up again in the next article. Here two spinning motors are counter balanced by two other spinning motors.
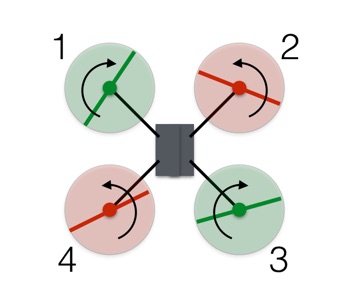 Source: Wired
Source: Wired
I mentioned mechanical simplicity because a multicopter can have almost no moving parts (you can literally keep the moving parts to the motor shafts with propellers fixed to them). This makes a multicopter a great option for drone flight. It is simple to build. However, that simplicity of build requies a more robust control system which we will get into in our next page.